From this article, we will guide you all possible stuffs about what is binary semaphore in OS along with their examples; as well as advantages and disadvantages with ease. After reading this article, you will get fully educate about Binary Semaphores in Operating System without any hindrance.
What is Binary Semaphore in OS?
Binary semaphore is a synchronization approach in operating system that has integer values ranging from 0 to 1. It provides mutual synchronization in between the processes that allowing only one process to enter a critical section at a time. The value of the semaphore variable is initially set to 1, but if a process requests a resource, the wait() method invokes, and the value of this semaphore will change from 1 to 0.
When the process completed with using the resource, then signal() method get invoke, and the value of this semaphore variable will raise to 1. If the value of this semaphore variable is 0 at a given point in time, and another process wants to access the same resource, it must wait for the prior process to release the resource. Binary semaphores are using to make ensuring the synchronization of operations and are the low-level synchronization mechanism.
Binary Semaphores Tutorial Headlines:
In this section, we will show you all headlines about this entire article; you can check them as your choice; below shown all:
What is Binary Semaphore in OS?
Working Structure of Binary Semaphore
Uses of Binary Semaphores
Key Features of Binary Semaphore
Binary Semaphore Example with Implementation in C
Advantages of Binary Semaphores
Disadvantages of Binary Semaphores
FAQs (Frequently Asked Questions)
What is the purpose of using a binary semaphore?
How does a binary semaphore support synchronization in a multi-threaded environment?
Can binary semaphore be used for inter-process synchronization?
Can binary semaphore be used for inter-process synchronization?
Let’s Get Started!!
Working Structure of Binary Semaphore
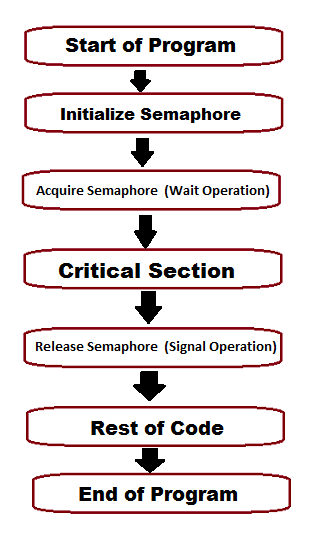
Here, we will simplify about working structure of binary semaphore along with its flowchart:
The binary semaphore get initialize with an initial value, typically 1 (unlocked) or 0 (locked).
This initialization often done during program or system initialization.
Acquiring (Wait Operation):
When a process or thread wants to enter a critical section, it attempts to acquire the binary semaphore.
If the semaphore value is 1 (unlocked), the process or thread allows to proceed, and the semaphore immediately will set to 0 (locked).
If the semaphore value is 0 (locked), the process or thread may block or put into a waiting state until the semaphore becomes available (i.e., when it get signal or release by another process or thread).
Critical Section:
The critical section is the protected code that only one process or thread should execute at a time.
While a process or thread is in the critical section, the binary semaphore remains in the locked state (value of 0).
Releasing (Signal Operation):
After completing the critical section in OS, the process or thread releases the binary semaphore, allowing other processes or threads to acquire it.
The semaphore value is set to 1 (unlocked).
If there are processes or threads waiting for the semaphore, one of them is typically unblocked or awakened to proceed.
Rest of Code:
The flow continues with the rest of the program.
Use in Mutual Exclusion:
The binary semaphore ensures mutual exclusion by controlling access to the critical section. Only one process or thread can hold the semaphore and enter the critical section at any given time.
Deadlock Avoidance:
It’s crucial to manage the use of binary semaphores carefully to avoid potential issues like deadlock. Deadlock can occur when processes are waiting indefinitely for each other to release resources.
Programming Interface:
Depending on the programming language and system, there are specific functions or operations for acquiring and releasing binary semaphores. Common functions include “wait” or “P” for acquiring and “signal” or “V” for releasing.
Implementation in Operating Systems:
Binary semaphores are often implementing at the kernel in operating system. System calls or kernel-level operations are using to manipulate the state of the semaphore.
End of Program:
The program concludes.
Uses of Binary Semaphores
Binary semaphores have several uses in operating systems and concurrent programming, including:
Critical Section Synchronization: Binary semaphores are often using to protect critical sections of code. A critical section is a part of the code that should not execute by more than one thread or process simultaneously. By using a binary semaphore, you can ensure that only one thread at a time can enter the critical section.
Resource Sharing: When multiple threads or processes need to access shared resources, such as files, databases, or hardware devices, binary semaphores can employ to prevent conflicts and ensure that only one entity accesses the resource at any given time.
Preventing Race Conditions: Binary semaphores help in preventing race conditions; whereas the outcome of program depends on the relative timing of events. By using a binary semaphore to control access to shared data, you can avoid situations where multiple threads try to modify the same data concurrently.
Producer-Consumer Problem: In scenarios where one or more threads produce data, and one or more threads consume that data, binary semaphores can use to synchronize the production and consumption to avoid issues like data corruption or deadlock.
Task Synchronization: Binary semaphores can use to synchronize the execution of tasks or threads. For example, you might have one thread waiting for a signal from another thread before it can proceed with its task.
Mutexes for Thread Safety: In multithreaded programming, binary semaphores are often using as mutexes to ensure thread safety. They help in preventing multiple threads from simultaneously accessing shared data, which could lead to data corruption or unpredictable behavior.
Implementing Locks: Binary semaphores are fundamental in implementing locks that are higher-level synchronization constructs using to manage access to shared resources. Locks can build using binary semaphores to provide a way for threads to acquire and release exclusive access.
Task Synchronization in Real-Time Systems: In real time systems, where tasks have strict timing requirements, binary semaphores are using to coordinate the execution of tasks to meet deadlines and ensure predictable system behavior.
Key Features of Binary Semaphore
Binary semaphores have key features that make them useful for synchronization in concurrent programming. Here are the key features of binary semaphores:
Binary semaphores have only two possible states: 0 and 1. This simplicity allows them to represent the availability or unavailability of a resource or a critical section.
Binary semaphores provide a mechanism for achieving mutual exclusion, ensuring that only one process or thread can access a critical section at any given time.
Processes or threads use the wait (or P) operation to acquire the semaphore and the signal (or V) operation to release it. The wait operation decrements the semaphore, and the signal operation increments it.
Binary semaphores are commonly using to protect shared resources, preventing multiple processes or threads from accessing them simultaneously and potentially causing data corruption.
Binary semaphores enable synchronization between processes or threads, allowing for the coordination of activities and the enforcement of a specific order of execution.
By careful management of binary semaphores, systems can design to prevent deadlock situations, where processes are unable to proceed due to circular waiting for resources.
Binary semaphores can employ to mitigate priority inversion issues in priority scheduling systems, where lower-priority tasks hold resources needed by higher-priority tasks.
Binary semaphores are typically more efficient than counting semaphores due to their simple implementation with only two states.
Binary semaphores can use for signaling and synchronizing conditions between processes or threads, allowing for the implementation of various synchronization patterns.
Binary semaphores serve as a fundamental building block for more complex synchronization mechanisms. They are often using in combination with other synchronization primitives to achieve specific goals.
Binary semaphores do not track ownership. Any process or thread that successfully acquires the semaphore can release it, potentially leading to issues if ownership tracking require.
Binary Semaphore Example with Implementation in C
In C, you can use the POSIX threads library to implement binary semaphores. Here’s an example that demonstrates the use of binary semaphores for controlling access to a shared resource:
#include <stdio.h>
#include <pthread.h>
// This is for semaphore
#include <semaphore.h>
#include <unistd.h>
// Binary semaphore to control access to the shared resource
sem_t printer_semaphore;
// Function to simulate printing with mutual exclusion
void* print_document(void* user) {
char* username = (char*)user;
printf(“%s is waiting to use the printer.\n”, username);
// Acquiring the semaphore (wait operation)
sem_wait(&printer_semaphore);
// Critical section: accessing the shared resource (printer)
printf(“%s is using the printer to print.\n”, username);
// Simulating some printing time
sleep(2);
// Releasing the semaphore (signal operation)
sem_post(&printer_semaphore);
printf(“%s has finished printing.\n”, username);
pthread_exit(NULL);
}
int main() {
// Initialize the binary semaphore with an initial value of 1
sem_init(&printer_semaphore, 0, 1);
// Create threads that simulate users trying to print documents
In this example, the sem_init function is used to initialize the binary semaphore with an initial value of 1. The sem_wait function is the wait operation, and sem_post is the signal operation. The critical section (printing) is placed between the sem_wait and sem_post calls to ensure mutual exclusion.
Compile this code using a C compiler that supports POSIX threads, for example:
This will produce an executable named printer_example. When you run it, you should see the output demonstrating that only one user can use the printer at a time.
Advantages of Binary Semaphores
Here are some advantages of using binary semaphores, including:
Mutual Exclusion: Ensures only one process accesses a critical section at a time.
Resource Protection: Safeguards shared resources from simultaneous access.
Synchronization: Facilitates coordination and order of execution among processes or threads.
Deadlock Prevention: Helps design systems that avoid circular waiting and prevent deadlocks.
Priority Inversion Mitigation: Can be used to minimize priority inversion issues in priority scheduling systems.
Simple Implementation: Binary semaphores are straightforward to implement with only two states.
Efficiency: Generally more efficient than counting semaphores due to their simplicity.
Condition Synchronization: Allows signaling and synchronization of conditions between processes or threads.
Disadvantages of Binary Semaphores
There are few remarkable drawbacks and limitations of binary semaphores in OS, as following them:
Lack of Counting: Binary semaphores can only represent two states (0 or 1), limiting their use in scenarios that require counting or tracking multiple occurrences.
No Priority Handling: Binary semaphores do not inherently provide mechanisms for handling task priorities. Priority inversion issues may arise in systems with varying task priorities.
Potential Deadlocks: If not carefully managed, the use of binary semaphores can still lead to deadlock situations, especially in complex systems with multiple interdependencies.
Limited Expressiveness: Binary semaphores might not be expressive enough for certain synchronization scenarios that require more nuanced signaling or complex synchronization patterns.
Difficulty in Debugging: In situations involving complex interactions between processes or threads, debugging issues related to binary semaphores can be challenging due to their binary nature.
Possible Spurious Wakeups: Binary semaphores may suffer from spurious wakeups, where a thread is unblocked even though no explicit signal or release has occurred. This can introduce unpredictability.
Lack of Priority Inheritance: Unlike some other synchronization mechanisms, binary semaphores do not inherently support priority inheritance, potentially leading to priority inversion issues.
Overhead in High Contention: In scenarios with high contention for resources, the use of binary semaphores might introduce overhead due to frequent context switching and contention.
FAQs (Frequently Asked Questions)
What is the purpose of using a binary semaphore?
The purpose of using a binary semaphore is to control access to a shared resource in a concurrent programming environment. It helps ensure that only one process or thread can access the shared resource at a time, preventing conflicts and race conditions.
How does a binary semaphore support synchronization in a multi-threaded environment?
Binary semaphore supports synchronization by providing atomic “wait” (decrement) and “signal” (increment) operations. When a thread wants to access a shared resource, it performs a “wait” operation on the semaphore. If the semaphore is 1, it decrements it to 0 and continues. If the semaphore is 0, the thread is blocked until the semaphore becomes 1. After using the resource, the thread performs a “signal” operation, incrementing the semaphore, potentially unblocking waiting threads.
Can binary semaphore be used for inter-process synchronization?
Yes! Binary semaphores can use for inter-process synchronization, but the specific implementation may depend on the different types of operating system and the synchronization mechanisms it supports. In many systems, semaphores can create in a shared memory space, allowing multiple processes to access and manipulate them for synchronization.
Can a binary semaphore be used for deadlock prevention?
While binary semaphores themselves don’t prevent deadlocks, they can be part of a deadlock prevention strategy when used in conjunction with other synchronization primitives.
At The End
Now we can hope that you have completely learnt about what is binary semaphore in OS along with their examples; as well as advantages and disadvantages with ease. If this article is useful for you, then please share it along with your friends, family members or relatives over social media platforms like as Facebook, Instagram, Linked In, Twitter, and more.







: Examples, Applications, & Functions!!")

: Examples, Types, and Functions!!")




